第11回: 順序回路のHDL記述(2): ステートマシン
復習:状態遷移回路
(p.92〜)
フリップフロップを使った順序回路は、
いわゆる状態遷移回路(ステートマシン)として一般化することができます。
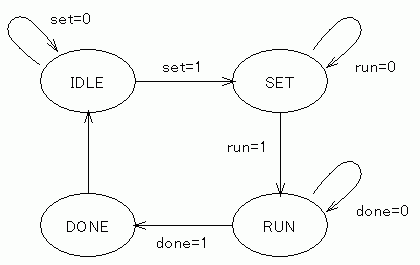
これは、このような状態遷移図によって動作を表現できる回路で、
いくつかの内部状態(state)をもち、クロックにあわせて、
入力によって、次の状態が決まる、というものです。
この例では、IDLE, SET, RUN, DONEという4つの状態を持ち、
例えば、現在の状態がIDLEのときは、setという入力が0のときは
次の状態もIDLE、set=1ならば次の状態はSETとなる、という動作を
あらわしています。
もちろんカウンタなども、このステートマシンとして
考えることができます。
(内部状態=現在のカウント値、と考えればよい)
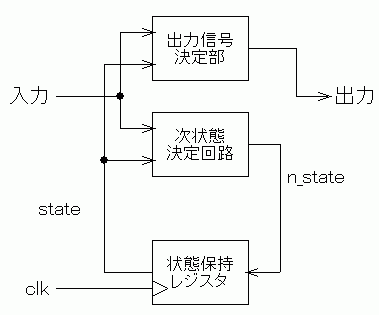
このようなステートマシンは、一般にはこのような構成の回路によって
実現することができます。
現状態stateを保持しているレジスタ(実体は、ほとんどの場合はD-FF)、
現状態と入力から次の遷移先の状態n_stateを決める次状態決定回路、
そして現状態と入力から、全体としての出力を決める
出力信号決定部、からなります。
一般には、現状態と次状態、入力・出力の対応を状態遷移表にまとめ、
それを真理値表とみなして次状態決定回路、出力信号決定部の
論理回路を設計することになります。
設計例:タイマ
(p.94〜)
具体例として、タイマの回路を、ステートマシンとして
設計してみましょう。
入力を、次のように決めてみます。
- clk: クロック。周波数=1Hz
- rst: リセット。rst=0のときに同期リセット
- set: 1のとき、時間セット状態に移る
- run: 1のとき、カウントダウン状態に移る(タイマの起動)
- s10: 時間セット状態のとき、1ならば10秒加算する
- s60: 時間セット状態のとき、1ならば60秒加算する
- done: 時間カウントが0になったときに、1クロック間だけ1となる出力
- cnt: 時間の出力(単位=秒)。12ビット。
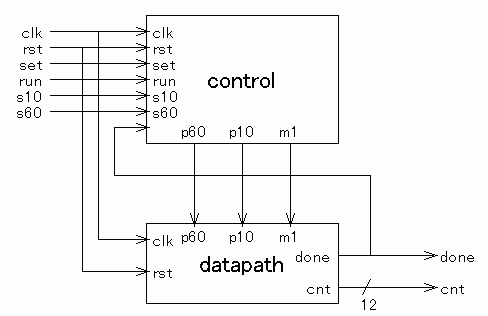
全体を、この図のような構成で考えてみます。
大きく、制御部controlとデータパス部datapathからなります。
データパス部
データパス(data-path)とは、演算回路、と考えてもらってかまいません。
つまり、指定された信号にyとて、所望の演算結果を出力する
回路、ということです。
ここでは、以下の3段階で、データパスを設計してみます。
1.時間設定用データパス
まず時間セットを行う状態(SET)は、時間セット用のスイッチである
s10とs60の値をみて、
s10=1ならば時間カウントを10秒加算し、
s60=1ならば時間カウントを60秒加算するという動作をします。
これらの動作は、すべてクロックclkの立ち上がりに同期して
行われると仮定しておきます。(いわゆる同期式回路)
これから、上記のようなデータパスを設計することができます。
ここでREGは、時間カウント値を保持しておく12ビットのレジスタ(変数)で、
その実体はクロックclkに同期した12ビットのD-FFと考えてください。
このレジスタの出力はcntという名前の出力になっています。
またADDは加算回路で、ADDの下側の入力は、s10などの信号に応じて
10, 60, 0のいずれかが与えられます。
2.カウントダウン用データパス
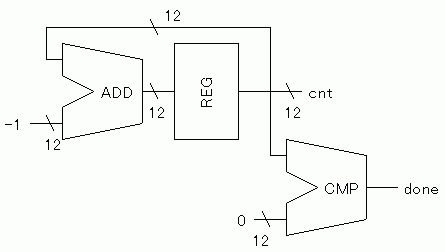
続いて、カウントダウンを行っている状態(RUN)の
データパスを考えてみます。
カウントダウン時には、1秒ごと、つまりclkの立ち上がりごとに
時間カウント値cntが1ずつ減っていくことになりますので、
さきほどと同様に、REGとADDを組み合わせ、
ADDの下側の入力として-lを与えています。
またカウントダウン終了を検出するために、
時間カウント値cntが0となったときに、カウントダウン終了を
示す出力done=1とするために、cntと0とをコンパレータCMPによって
比較しています。
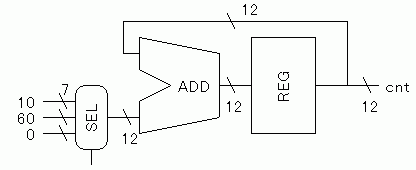
3.全体のデータパス
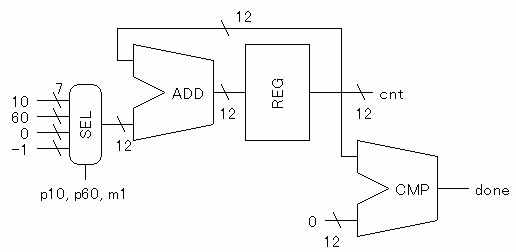
ここまでで見てきた1.と2.は、大部分が共通の構成ですので、
両者をまとめ、このようなデータパスにまとめることができます。
ここで、セレクタSELに与えられている信号は次のような意味です。
- p10: p10=1のとき、時間カウント値に10を加える(s10=1に対応)
- p60: p60=1のとき、時間カウント値に60を加える(s60=1に対応)
- m1: m1=1のとき、時間カウント値を1減らす(カウントダウン動作時に対応)
これをふまえてデータパスをVHDLで記述すると
次のようになります。(p.99: 要点のみ抜粋)
entity datapath is
port(
clk, rst, p10, p60, m1: in std_logic;
done: out std_logic;
cnt: out std_logic_vector(11 downto 0));
end datapath
architecture arch of datapath is
signal reg12_out, reg12_in: std_logic_vetor(11 downto 0);
signal sel_out: std_logic_vector(6 downto 0);
function sign_extend (a: std_logic_vector(6 downto 0))
return std_logic_vector is
begin
if (a(6) = '1') then return("11111" & a);
else return("00000" & a);
end if
end sign_extend
begin
process (p10, p60, m1) begin -- selector
if (p10 = '1') then sel_out = "0001010"; -- "10"
elsif (p60 = '1') then sel_out = "0111100"; -- "60"
elsif (m1 = '1') then sel_out = "1111111"; -- "-1"
else sel_out = "0000000";
end if;
end process;
process (reg12_out, sel_out) begin -- adder
reg12_in <= reg12_out + sign_extend(sel_out);
end process;
process (clk, rst) begin -- register
if (rst = '0') then reg12_out = "000000000000";
elsif (clk'event and clk = '1') then re12_out <= reg_in;
end if;
end process;
process (reg12_out) begin -- comparator
if (reg12_out = "000000000000") then done <='1';
else done <= '0';
end if
end process;
cnt <= reg12_out;
end arch;
制御部
続いて、データパスを制御する制御部を設計してみます。
これは、実は最初に例として紹介した状態遷移図のような
動作をするステートマシンを設計することになります。
制御部の入出力は、さきほどの全体の入出力に加えて、
データパスの制御のためのp10, p60, m1があります。
この制御部のVHDL記述は次のようになります。(p.103: 要点のみ抜粋)
前半のcase文が、まさに状態遷移図に対応している
次状態決定回路になっていて、
また後半のcase文が、出力決定部になっていることに注意しましょう。
またステートマシンの本質である状態遷移は、2つ目のprocess文で
記述されていることにも注意しておきましょう。
entity control is
port(
clk, rst, set, run, s10, s60, done: in std_logic;
p10, p60, m1: out std_logic);
end control;
architecture arch of control is
type t_state is (IDLE_ST, SET_ST, RUN_ST, DONE_ST);
signal state, next_state: t_state;
begin
process (state, set, run, done) begin -- next state calc
case state is
when IDLE_ST =>
if (set = '1') then next_state <= SET_ST;
else next_state <= IDLE_ST;
end if;
when SET_ST =>
if (run = '1') then next_state <= RUN_ST;
else next_state <= SET_ST;
end if;
when RUN_ST =>
if (done = '1') then next_state <= DONE_ST;
else next_state <= RUN_ST;
end if;
when DONE_ST => next_state <= IDLE_ST;
end case;
end process;
process (clk, rst) begin -- state register
if (rst = '0') then state <= IDLE_ST;
elsif (clk'event and clk = '1') then state <= next_state;
end if;
end process;
process (state, s10, s60, done) begin -- control signals
p10 <= '0'; p60 <= '0'; m1 <= '0';
case state is
when IDLE_ST => null;
when SET_ST =>
if (s10 = '1') then p10 <= '1';
elsif (s60 = '1') then p60 <= '1';
end if;
when RUN_ST =>
if (done /= '1') then m1 <= '1'; -- /= : Not Equal ※←教科書の記述が間違っているようです
end if;
when DONE_ST => null;
end case;
end process;
end arch;
トップ階層
ここまでで設計したデータパス、制御部を統合した
タイマ全体のトップ階層をVHDLで記述すると
次のようになります。(p.106: 要点のみ抜粋)
データパス、制御部をインスタンスで呼び出して接続していることに
注意しておきましょう。
entity timer is
port(
clk, rst, set, run, s10, s60: in std_logic;
done: out std_logic;
cnt: std_logic_vector(11 downto 0));
end timer;
architecture arch of timer is
component control
port(
clk, rst, set, run, s10, s60, done: in std_logic;
p10, p60, m1: out std_logic);
end component;
component datapath
port(
clk, rst, p10, p60, m1: in std_logic;
done: out std_logic;
cnt: out std_logic_vector(11 downto 0));
end component;
signal p10, p60, m1, done_tmp: std_logic;
begin
i0: control port map(
clk, rst, set, run, s10, s60, done_tmp, p10, p60, m1);
i1: datapath port map(
clk, rst, p10, p60, m1, done_tmp, cnt);
done <= done_tmp;
end arch;
構成を意識しないVHDL記述
上記の例では、タイマを、データパスと制御部に分けて
VHDLで記述し、最後に両者を統合する、という手順で設計しました。
実はステートマシンの設計では、このようにデータパスと制御部を
分けずに、次のようにまとめて回路を記述することもできます。
(p.109: 要点のみ抜粋)
この記述の方が、ステートマシンの動作の記述としては
直感的でわかりやすいかもしれません。
ただし、一般に、このような構成を意識しない記述から
論理合成によって得られる回路は、構成を意識した記述から
得られる回路よりも、「質」が低くなる傾向があります。
すなわち回路規模が大きく、消費電力が大きくなる傾向があります。
そのため、なるべくデータパスと制御部を分けて記述するほうが、
とりあえず動く回路、では不十分な場合で、
より質の高い論理回路を得たい場合は、得策となるようです。
architecture arch2 of timer is
type t_state is (IDLE_ST, SET_ST, RUN_ST, DONE_ST);
signal state: t_state;
signal cnt_tmp: std_logic_vector(11 downto 0);
signal sel_out: std_logic_vector(6 downto 0);
begin
process (clk, rst) begin
if (rst = '0') then
cnt_tmp <= "000000000000";
done <= '0';
state <= IDLE_ST;
elsif (clk'event and clk = '1') then
case state is
when IDLE_ST =>
if (set = '1') then state <= SET_ST;
else state <= IDLE_ST;
end if;
when SET_ST =>
if (s10 = '1') then
cnt_tmp <= cnt_tmp + "000000001010";
elsif (s60 = '1') then
cnt_tmp <= cnt_tmp + "000000111100";
end if;
if (run = '1') then state <= RUN_ST;
else state <= SET_ST;
end if;
when RUN_ST =>
cnt_tmp <= cnt_tmp - "000000000001";
if (cnt_tmp = "000000000001") then
done <= '1';
state <= DONE_ST;
else state <= RUN_ST;
end if;
when DONE_ST =>
done = '0';
state <= IDLE_ST;
end case;
end if;
end process;
cnt <= cnt_tmp;
end arch2;
配布資料
戻る