



偙傟傜偑丄師偺恾偺傛偆偵愙懕偝傟偰偄傑偡丅

傑偢偼偙偙偱偼丄偙偺慡懱峔惉恾偺徻嵶傑偱傒傞昁梫偼偁傝傑偣傫丅
嵹偭偰偄傞LED傗僗僀僢僠側偳偑丄CPU偑幚峴偡傞
僾儘僌儔儉偵傛偭偰惂屼偱偒傞傫偩丄偲偄偆偙偲偩偗丄
摢偵擖傟偰偍偄偰偔偩偝偄丅
乽CPU偑僾儘僌儔儉傪幚峴偡傞乿偲偼丄儊儌儕偵擖偭偰偄傞 僾儘僌儔儉(嶌嬈庤弴彂)傪弴偵乽撉傒弌偟乿丄夝庍偟偰 幚峴偟丄昁梫偵墳偠偰寢壥傪儊儌儕偵乽彂偒崬傓乿偙偲丄 偲尵偆偙偲偑偱偒傑偡丅
偦偟偰儊儌儕偐傜柦椷傗僨乕僞傪撉傒彂偒偡傞偲偒偵偼丄 儊儌儕偺拞偺応強傪乽傾僪儗僗(address)乿偲偄偆悢抣偵傛偭偰 巜掕傪偡傞偺偱偟偨丅
偙偺儃乕僪偱偼丄LED傗僗僀僢僠側偳偺丄擖弌椡憰抲(Input/Output; I/O偲棯婰偟傑偡)傕丄偙偺乽儊儌儕偵懳偡傞撉傒彂偒(傾僋僙僗)乿偲 摨條偵峴偆偙偲偑偱偒傞傛偆偵側偭偰偄傑偡丅 偙偺傛偆側巇慻傒傪 儊儌儕儅僢僾僪I/O (Memory-mapped I/O)偲屇傃傑偡丅
嬶懱揑偵偼丄偦傟偧傟偺I/O憰抲偑丄師偺傛偆偵 妱傝摉偰(memory-mapped)偝傟偰偄傑偡丅
| I/O憰抲 | 傾僪儗僗(16恑悢昞婰) | 傾僋僙僗曽朄 |
| 7僙僌儊儞僩LED(0寘栚) | 0x4000斣抧 | 彂偒崬傒 |
| 7僙僌儊儞僩LED(1寘栚) | 0x4001斣抧 | 彂偒崬傒 |
| 7僙僌儊儞僩LED(2寘栚) | 0x4002斣抧 | 彂偒崬傒 |
| 7僙僌儊儞僩LED(3寘栚) | 0x4003斣抧 | 彂偒崬傒 |
| 僗僀僢僠(8屄) | 0x4004斣抧 | 撉傒弌偟 |
| LED(8屄) | 0x4005斣抧 | 彂偒崬傒 |
椺偊偽丄0x4004斣抧傪乽撉傒弌偡乿偲丄僗僀僢僠偺忬懺偑傢偐傝丄 0x4000斣抧偵悢抣傪乽彂偒崬傓乿偲丄7僙僌儊儞僩LED偺0寘栚(塃抂)偺 昞帵傪愝掕偱偒傞丄偲偄偆傢偗偱偡丅
側偍丄彂偒崬傒梡偺傕偺傪撉傒弌偦偆偲偟偰傕丄 惓偟偄抣傪撉傒弌偡偙偲偼偱偒傑偣傫丅 偮傑傝塃抂偺7僙僌儊儞僩LED偵昞帵偝傟偰偄傞抣傪挷傋傛偆偲巚偭偰丄 師偺傛偆側婰弎傪偟偰傕丄惓偟偄抣偼摼傜傟傑偣傫丅 (惓偟偔側偄抣偑戙擖偝傟傞壜擻惈偑崅偄丅 嬼慠昞帵偝傟偰偄傞抣偑摼傜傟傞偙偲傕偁傞偑丄 摼傜傟側偄偙偲傕懡偄丅)
i = num0; /* NG (read) */
volatile BYTE xdata num0 _at_ 0x4000; // 0 digit of 7seg.LED volatile BYTE xdata num1 _at_ 0x4001; // 1 digit of 7seg.LED volatile BYTE xdata num2 _at_ 0x4002; // 2 digit of 7seg.LED volatile BYTE xdata num3 _at_ 0x4003; // 3 digit of 7seg.LED volatile BYTE xdata sw _at_ 0x4004; // SWs volatile BYTE xdata led _at_ 0x4005; // LEDs椺偊偽丄乽led乿偲偄偆BYTE宆(1僶僀僩=8價僢僩)偺曄悢偑 0x4005斣抧偵妱傝摉偰傜傟偰偄傑偡丅 偙偺0x4005斣抧偺撪梕偼丄愭偺偲偍傝乽LED(8屄)偺揰摂丒徚摂傪寛傔傞 儊儌儕儅僢僾僪I/O乿偱偟偨丅 偦偺偨傔丄曄悢led偵抣傪彂偒崬傓偲丄幚嵺偵偼0x4005斣抧偵 彂偒崬傑傟丄寢壥偲偟偰偦偺抣偵墳偠偰奺LED偑揰摂丒徚摂偡傞偙偲偵 側傝傑偡丅 側偍偙偙偱丄曄悢led偺抣偼1僶僀僩=8價僢僩丄偮傑傝 8慻偺乽0傑偨偼1偺抣乿偱偡偑丄 偦偺奺寘偑丄8屄偺LED偦傟偧傟偺揰摂丒徚摂偵懳墳偟偰偄傞偙偲偵 拲堄偟傑偟傚偆丅
椺偊偽偙偺曄悢led偵丄師偺傛偆偵抣0x81傪戙擖偡傞偲偟傑偡丅
led = 0x81;偙偙偱戙擖偟偰偄傞抣0x81偼丄2恑悢偱彂偔偲"10000001"偱偡偐傜丄 抣偑1偵側偭偰偄傞丄堦斣嵍抂偺LED(LED7)偲堦斣塃抂偺LED(LED0)偺傒偑 揰摂偟丄偦傟埲奜偼徚摂偡傞偙偲偵側傝傑偡丅
摨條偵椺偊偽丄 1僶僀僩偺曄悢sw偺抣傪撉傒弌偡偲 8屄偺僗僀僢僠偦傟偧傟偺忬懺偑傢偐傞偙偲偵側傝傑偡丅 偮傑傝8價僢僩偺偦傟偧傟偑8屄偺僗僀僢僠偵懳墳偟丄 嵟忋埵偑嵍抂偺SW7丄嵟壓埵偑塃抂偺SW0偺抣傪偁傜傢偟丄 奺僗僀僢僠偑墴偝傟偰偄傟偽丄偦偺寘(價僢僩)偺抣偑1偵丄 墴偝傟偰偄側偗傟偽0偵側傝傑偡丅 偦偙偱丄椺偊偽SW3偺抣傪if暥偱挷傋偨偗傟偽丄 師偺傛偆偵彂偗偽傛偄偱偟傚偆丅
if ((sw & 0x08) != 0){
..
傑偢幚尡梡偺僼僅儖僟傪嶌惉偟傑偡丅 儅僀僐儞僺儏乕僞仺Z僪儔僀僽偺拞丄傑偨偼丄乽儅僀 僪僉儏儊儞僩乿偺拞偵丄 幚尡戞1梡偺僼僅儖僟傪嶌惉偟傑偡丅 崱屻偺嶌嬈偼偡傋偰偙偺拞偱峴偆偙偲偵偟傑偡丅 側偍丄乽Z僪儔僀僽乿傑偨偼乽儅僀 僪僉儏儊儞僩乿偵抲偄偨僼傽僀儖偼 偳偺僷僜僐儞偱傕嫟桳偝傟傑偡丅
傑偢丄愭傎偳偺僼僅儖僟撪偵丄揔摉側柤徧偱丄偙傟偐傜偺嶌嬈梡偺 僼僅儖僟傪嶌惉偟傑偡丅 偦偙偵僒儞僾儖僾儘僌儔儉偲偟偰丄 sample.c 偲 sample.Uv2 傪僟僂儞儘乕僪偟傑偡丅 崱屻丄暿偺僾儘僌儔儉傪嶌惉偡傞偲偒偼丄揔媂暿偺僼僅儖僟傪嶌惉偟丄 偦偺拞偵偙偺2偮傪僟僂儞儘乕僪偟偰丄偦傟傪曇廤偡傞傛偆偵偟傑偡丅 傑偨丄嶌惉偟偨僾儘僌儔儉傪巆偟側偑傜丄偐偮丄偦傟傪曄峏偟偰偄偒偨偄応崌偵偼丄 僼僅儖僟傪傑傞偛偲僐僺乕偟傑偡丅 扨偵sample.c傪僐僺乕偟偰丄 僐僺乕愭偺怴偟偄僼傽僀儖傪曇廤偟傛偆偲偟偰傕偆傑偔偄偒傑偣傫丅
偦偺拞偵偁傞sample.Uv2偺師偺傾僀僐儞傪僟僽儖僋儕僢僋偡傞偲丄
僐儞僷僀儔側偳偑摑崌偝傟偨奐敪娐嫬uVision2偑婲摦偟傑偡丅

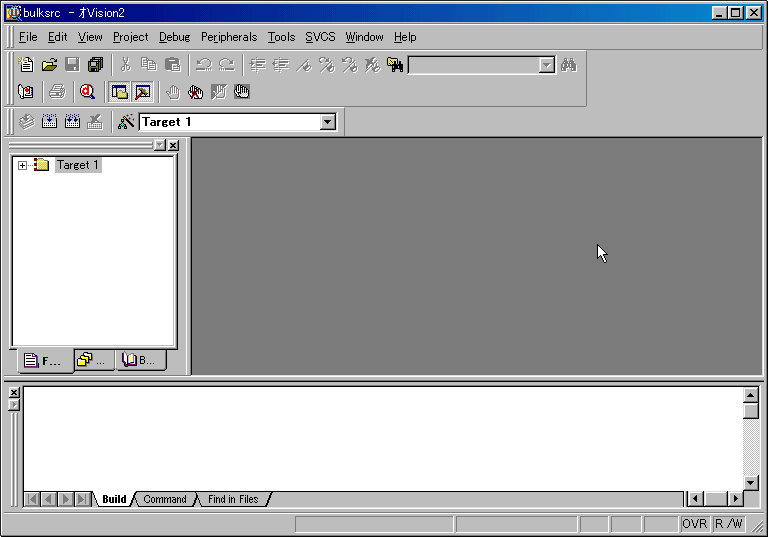
偙偺嵍懁偺僂僀儞僪僂撪偺丄Target1仺SourceGroup1偲弴偵
+儅乕僋傪僋儕僢僋偡傞偲丄sample.c偑尒偮偐傞偼偢偱偡偺偱丄
偦傟傪僟僽儖僋儕僢僋偡傞偲丄塃懁偺僂僀儞僪僂偵丄
僾儘僌儔儉sample.c偺撪梕偑昞帵偝傟傑偡丅
#include "Fx2.h"
#include "Fx2regs.h"
// definition of memory-mapped I/O devices and external memories
volatile BYTE xdata num0 _at_ 0x4000; // 0 digit of 7seg.LED
volatile BYTE xdata num1 _at_ 0x4001; // 1 digit of 7seg.LED
volatile BYTE xdata num2 _at_ 0x4002; // 2 digit of 7seg.LED
volatile BYTE xdata num3 _at_ 0x4003; // 3 digit of 7seg.LED
volatile BYTE xdata sw _at_ 0x4004; // SWs
volatile BYTE xdata led _at_ 0x4005; // LEDs
main()
{
// initialization
CKCON |= 0x07; OEE = 0xef;
led = 0; num0 = 10; num1 = 10; num2 = 10; num3 = 10;
while(1){
// write your code here
}
}
嵟屻偺傎偆偵丄while暥偑偁傝傑偡偑丄while(1)偱偡偺偱丄
{}撪偑柍尷儖乕僾偵側偭偰偄傑偡丅
偦偙偱偙偺{}撪偵丄幚峴偡傞傋偒僾儘僌儔儉傪彂偔偙偲偵偟傑偡丅
崱夞偼丄椺偲偟偰師偺傛偆偵彂偄偰傒傑偟傚偆丅
while(1){
// write your code here
led = sw;
}
僾儘僌儔儉傪婰弎偟偨傜丄曐懚偟偨屻丄
儊僯儏乕偐傜Project仺Build Target(F7)傪
慖傫偱丄僾儘僌儔儉偺僐儞僷僀儖傪峴偄傑偡丅
(僼傽儞僋僔儑儞僉乕偺F7傪墴偟偰傕偐傑偄傑偣傫)
僐儞僷僀儖偺夁掱偑壓偺僂僀儞僪僂偵昞帵偝傟傑偡偺偱丄
僄儔乕側偳偑側偄偐妋擣偟傑偡丅
儃乕僪偲僷僜僐儞偺USB億乕僩傪働乕僽儖偱愙懕偟傑偡丅 (偙偺偲偒丄嵟弶偩偗僪儔僀僶偺僀儞僗僩乕儖偑峴傢傟傞偙偲偑偁傝傑偡) 偙偺偲偒丄8屄偺LED偺偡傋偰傑偨偼堦晹偑揰摂偡傞偙偲偑偁傝傑偡偑丄 偙偙偱偼婥偵偟側偔偰偐傑偄傑偣傫丅
偦偺屻丄
僨僗僋僩僢僾忋偵偁傞"EZ-USB Control Panel"傪僟僽儖僋儕僢僋偟偰
EZ-USB Control Panel(埲壓丄ControlPanel偲棯婰)傪婲摦偟傑偡丅
婲摦偡傞偲丄師偺傛偆側夋柺偵側偭偰偄傞偼偢偱偡丅
側偍ControlPanel偺拞墰忋偺乽Target乿偺偲偙傠偑"FX2"偲側偭偰偄傞偙偲傪
妋擣偟偰偍偄偰偔偩偝偄丅
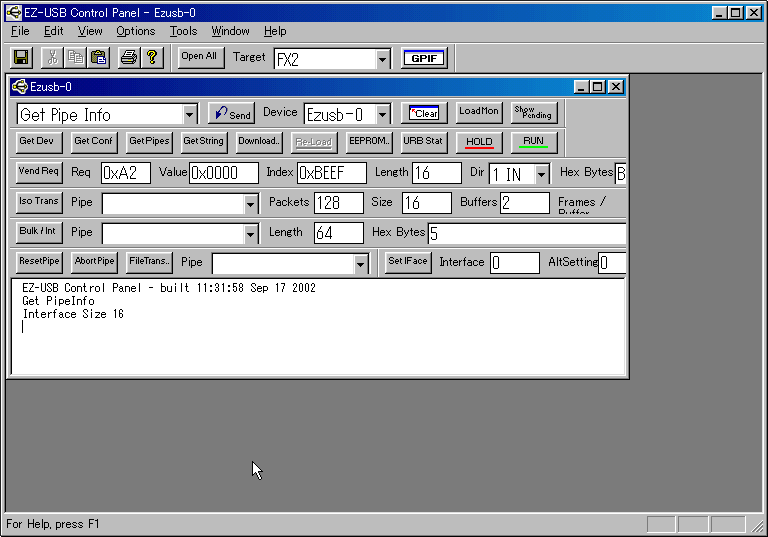
傕偟偙偺傛偆偵側偭偰偄側偄偲偒傗丄"No EZ-USB Device Found"偲
昞帵偝傟傞偲偒偼丄
儃乕僪偺愙懕傪妋擣偟丄[Open All]儃僞儞傪墴偟偰傒傑偟傚偆丅
懕偄偰丄僐儞僷僀儖偟偨僾儘僌儔儉傪丄儃乕僪偵揮憲偟傑偡丅 [Download]儃僞儞傪墴偡偲丄揮憲偡傞僾儘僌儔儉僼傽僀儖傪慖傇 夋柺偑尰傟傑偡偺偱丄偝偒傎偳嶌惉偟偨僼僅儖僟撪偺 sample.hex傪慖戰偟傑偡丅
偡傞偲揮憲偑峴傢傟丄捈偪偵僾儘僌儔儉偺幚峴偑奐巒偝傟傑偡丅
側偍2夞栚埲崀僾儘僌儔儉傪揮憲偡傞偲偒丄 摨偠僾儘僌儔儉僼傽僀儖傪廋惓偟偨偩偗偱偁傟偽丄 uVision2偱僐儞僷僀儖屻偵丄ControlPanel偱[Re-Load]儃僞儞傪 墴偡偩偗偱揮憲丒幚峴偑峴傢傟傑偡丅 (偮傑傝枅夞揮憲偡傞僾儘僌儔儉僼傽僀儖傪慖戰偡傞昁梫偑側偄) 偪側傒偵[HOLD]儃僞儞偱CPU傪儕僙僢僩偝偣傞偙偲偑偱偒傑偡丅 傑偨[RUN]儃僞儞偱丄僾儘僌儔儉偺幚峴傪掆巭丒嵞奐偡傞偙偲偑偱偒傑偡丅
偦偟偰僾儘僌儔儉懁偐傜尒偊傞偺偼丄 偦傟偧傟偺寘偵昞帵偝偣偨偄抣(0乣9)傪丄 偦傟偧傟偺儊儌儕儅僢僾僪I/O偺傾僪儗僗偵彂偒崬傓偩偗偱 偦偺抣偑昞帵偝傟傑偡丅 椺偊偽0寘栚偵乽3乿偲昞帵偝偣偨偗傟偽丄 師偺傛偆偵婰弎偡傟偽傛偄偙偲偵側傝傑偡丅
num0 = 3;側偍彂偒崬傓抣偑0乣9偺斖埻奜偺偲偒偼丄悢抣偑昞帵偝傟傑偣傫丅 傑偨慜弎偺傛偆偵丄抣傪撉傒弌偡偙偲傕偱偒傑偣傫丅
void ShowInt(int d)
{
// write your code here
}
偺傛偆偵嶌惉偟偰偍偔偲丄屻偱嵞棙梡偱偒傞偺偱曋棙偱偡丅
僸儞僩:
偨偩偟丄 昞帵偝偣傞0乣9999偺悢抣偼 撪晹偱偼int宆偺曄悢堦屄偵曐帩偝偣傞偙偲偲偟丄 偦偺曄悢偺抣偐傜愮偺埵乣堦偺埵傪偦傟偧傟媮傔丄 偦傟傜傪7僙僌儊儞僩LED偵昞帵偝偣傞偙偲偲偟傑偡丅
僸儞僩丗
堦斒偵偼丄偁傞宆偑壗價僢僩(壗僶僀僩)偱偁傞偐偼丄堦掕偱偼側偔丄 CPU偺庬椶傗梡偄傞僐儞僷僀儔偵埶懚偟傑偡丅 曄悢偺宆偑壗僶僀僩偱偁傞偐偼sizeof偲偄偆墘嶼巕偱摼傞偙偲偑偱偒傑偡丅 乽sizeof (僨乕僞宆)乿偲偄偆幃偼丄 乽僨乕僞宆乿偑昁梫偲偡傞僶僀僩悢傪梌偊傑偡丅 乽sizeof 曄悢柤乿偼丄乽曄悢柤乿偺僶僀僩悢傪梌偊傑偡丅
偙偺僶僀僩悢偼丄偦偺曄悢偵戙擖偱偒傞悢抣偺尷奅偵娭學偟偰偒傑偡丅 椺偊偽晞崋側偟8價僢僩(unsigned char宆)偱偼0乣255偺悢抣傪昞尰偱偒傑偡丅 戙擖偱偒傞悢抣偺尷奅偵偼丄晞崋偺桳柍傕娭學偟偰偄傑偡丅 摨偠8價僢僩(1僶僀僩)偱偁偭偰傕丄 晞崋偮偒8價僢僩(char宆)偱偼-128乣127偵側傝傑偡丅 偙偺傛偆偵曄悢偑僾儘僌儔儉拞偱偲傝偆傞抣偵 拲堄偡傞昁梫偑偁傝傑偡丅
num3 = sizeof(long); num2 = sizeof(int); num1 = sizeof(short); num0 = sizeof(char);
unsigned char x; char y;偱偁傞帪偵丄
x = 255; x = x + 1; y = 128; y = 16 * 17; y = 16 * 16; y = 16 * 15; y = 16 * 8;側偳傪寁嶼偟偰傒傑偟傚偆丅
I/O億乕僩傪巊梡偡傞偲偒偵偼丄僾儘僌儔儉偺嵟弶偵丄 奺僺儞傪擖椡偁傞偄偼弌椡偺偳偪傜偲偟偰巊梡偡傞偐傪 愝掕偡傞昁梫偑偁傝傑偡丅 偙偺愝掕偼OEE(Output Enable E)偲偄偆摿庩側曄悢(幚嵺偵偼 儊儌儕儅僢僾僪偝傟偨1僶僀僩曄悢)偵抣傪彂偒崬傓偙偲偱峴偄傑偡丅 嬶懱揑偵偼丄弌椡偲偟偰巊梡偟偨偄僺儞偺寘傪1丄 擖椡偲偟偰巊梡偟偨偄僺儞偺寘傪0偲偟偨8價僢僩偺2恑悢(1僶僀僩)偺 抣傪愝掕偟傑偡丅
椺偊偽PE0偑弌椡偲偟偰愝掕偝傟偰偄傞偲偟偰丄 IOE偺0價僢僩栚傪1偵偡傞偲丄PE0偺抣偑1(偮傑傝崅偄揹埑3V)偲側傝傑偡丅
媡偵PE3偑擖椡偲偟偰愝掕偝傟偰偄傞偲偡傞偲丄
IOE偺3價僢僩栚傪撉傒庢傞偲丄PE3偵壛偊傜傟偰偄傞揹埑偑
崅偄(3V=1)偐掅偄(0V=0)偐傪抦傞偙偲偑偱偒傑偡丅
價僢僩墘嶼丒僔僼僩
偙偺傛偆偵摿偵I/O億乕僩傪憖嶌偡傞偲偒偵偼丄摿掕偺價僢僩偺傒傪
1傑偨偼0偵偟偨傝丄摿掕偺價僢僩偺抣偺傒傪抦傞昁梫偑惗偠傑偡丅
偙偺傛偆側偲偒偵偼丄價僢僩墘嶼偲屇偽傟傞曽朄偑曋棙偱偡丅
價僢僩憖嶌偼丄AND墘嶼巕(&)傗OR墘嶼巕(|)傗NOT墘嶼巕(~)傪梡偄偰 曄悢偺拞偺摿掕偺價僢僩偺傒傪憖嶌偡傞媄朄偱丄 椺偊偽師偺傛偆側婰弎偵傛偭偰峴偆偙偲偑偱偒傑偡丅
| 曄悢a偺0價僢僩栚(嵟壓埵價僢僩)偺傒傪1偵偡傞 | a = a | 0x01; |
| 曄悢a偺2價僢僩栚偺傒傪1偵偡傞 | a = a | 0x04; |
| 曄悢a偺4價僢僩栚偺傒傪0偵偡傞 | a = a & ~0x10; |
| 曄悢a偺6價僢僩栚偑0偱偁傞偐傪挷傋傞 | (a & 0x40)==0 |
偙偺D/A曄姺婍偺埖偄曽傪抦傞偨傔偵偼丄 D/A曄姺婍TLV5626偺僨乕僞僔乕僩傪 撉傓偙偲偵側傝傑偡丅 梫揰偼丄師偺傛偆側偙偲偵側傝傑偡丅
 嬶懱揑偵偼丄
嬶懱揑偵偼丄
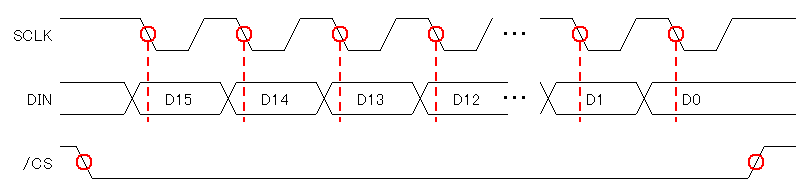
偮傑傝D/A曄姺婍TLV5626傊偺僨乕僞偺揮憲偼16價僢僩(2僶僀僩)傪 扨埵偲偟偰峴偆偙偲偵側傝傑偡丅
偦偟偰憲傞傋偒僨乕僞偼丄師偺2慻偺16價僢僩(2僶僀僩)偲側傞偙偲偑 婰弎偝傟偰偄傑偡丅
| 弌椡抣 | 弌椡揹埑[V] |
| 0 | 0.00 |
| .. | .. |
| 128 | 2.048 |
| .. | .. |
| 255 | 4.096 |
偙偺乽弌椡抣乿傪丄忋埵4價僢僩偲壓埵4價僢僩偵傢偗丄 D/A曄姺婍偵憲傞偙偲偵側傞傢偗偱偡偑丄 椺偊偽抣0x12傪憲傞応崌偵偼丄2夞栚偺揮憲偱 師偺傛偆側2僶僀僩傪憲傞偙偲偵側傝傑偡丅
(僸儞僩丗弌椡抣偑丄偳偺傛偆偵2僶僀僩偺僨乕僞偵杽傔崬傑傟偰偄傞偐丄 傪峫偊傞偺偑億僀儞僩丅 1僶僀僩栚偺忋埵4價僢僩 (16恑悢偺忋埵寘) 乽0xc乿偼丄 偍傑偠側偄偲峫偊偰偐傑偄傑偣傫丅 壗屘乽0xc乿偵側傞偺偐傪峫偊傞昁梫偼偁傝傑偣傫丅)
void DACwrite(unsigned char d)
{
/* 撪晹嶲徠揹埑傪愝掕偡傞偍傑偠側偄 */
CS_DAC(1); CK(1); /* 弶婜忬懺 */
CS_DAC(0);
DACwrite_byte(0xd0); DACwrite_byte(0x02);
CS_DAC(1);
/* 弌椡抣d偵懳墳偡傞揹埑傪敪惗偝偣傞 */
CS_DAC(0);
DACwrite_byte(0xc0 | (d >> 4));
DACwrite_byte(d << 4);
CS_DAC(1);
}
側偍乽>>乿偼丄巜掕偟偨價僢僩暘偩偗塃偵僔僼僩偡傞墘嶼巕偱丄
椺偊偽"0x53 >> 4"偼0x05偲側傝傑偡丅
摨條偵乽<<乿偼丄巜掕偟偨價僢僩暘偩偗嵍偵僔僼僩偡傞墘嶼巕偱偡丅
(戞1擔栚偼偙偺偁偨傝傑偱傪栚埨偲偡傞偲傛偄偱偟傚偆丅 傕偭偲愭傑偱恑傫偱偍偔偲戞2擔栚偑妝偵側傝傑偡丅)
/* CK(d): D/A曄姺婍偺SCLK傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void CK(char d) {if (d == 1) IOE |= 0x01; else IOE &= ~0x01;}
/* CS_DAC(d): D/A曄姺婍偺/CS傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void CS_DAC(char d){if (d == 1) IOE |= 0x04; else IOE &= ~0x04;}
/* DO_DAC(d): D/A曄姺婍偺DIN傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void DO_DAC(char d){if (d == 1) IOE |= 0x08; else IOE &= ~0x08;}
| 梌偊傞揹埑[V] | 曄姺抣 |
| 0.0 | 0x00 |
| .. | .. |
| 2.5 | 0x80 |
| .. | .. |
| 5.0 | 0xff |

側偍/CS=0偺婜娫偵CLOCK傪8夞梌偊傞売強偑2夞偁傝傑偡偑丄 偙偺1夞栚偱傾僫儘僌揹埑傪僨傿僕僞儖抣偵曄姺偩偗峴傢傟丄偦偺寢壥傪2夞栚偵撉傒弌偟偰偄傞偨傔偱偡丅 偦偺偨傔昁偢2夞昁梫偱偡丅
/* CK(d): D/A曄姺婍偺SCLK傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void CK(char d) {if (d == 1) IOE |= 0x01; else IOE &= ~0x01;}
/* CS_ADC(d): A/D曄姺婍偺/CS傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void CS_ADC(char d){if (d == 1) IOE |= 0x02; else IOE &= ~0x02;}
/* CS_DAC(d): D/A曄姺婍偺/CS傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void CS_DAC(char d){if (d == 1) IOE |= 0x04; else IOE &= ~0x04;}
/* DO_DAC(d): D/A曄姺婍偺DIN傪d (d=0 or 1)偵愝掕偡傞娭悢 */
void DO_DAC(char d){if (d == 1) IOE |= 0x08; else IOE &= ~0x08;}
/* DI_ADC(): A/D曄姺婍偺DATAOUT傪撉傒庢傞娭悢 */
char DI_ADC(){if ((IOE & 0x10) == 0) return(0); else return(1);}
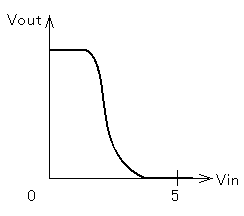
SN7404偼僀儞僶乕僞(斲掕僎乕僩)偑6屄擖偭偨IC偱偡丅
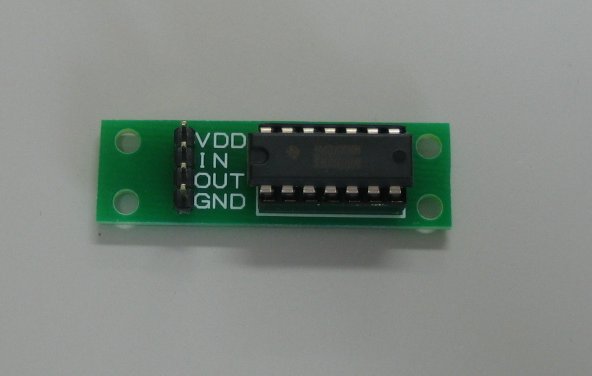
偙偺儃乕僪偺VDD傪揹尮揹埑(+5V)丄GND傪僌儔儞僪(0V)偵愙懕偟丄
IN偵梌偊傞揹埑傪曄偊偨偲偒偵OUT偵尰傟傞揹埑偺
娭學傪挷傋偰傒傞偙偲偵偟傑偡丅
僀儞僶乕僞偱偼丄擖椡偑0(掅偄揹埑)偺偲偒偵偼弌椡偑1(崅偄揹埑)丄
擖椡偑1(崅偄揹埑)偺偲偒偵偼弌椡偑0(掅偄揹埑)偲側傞偼偢偱偡偺偱丄
偍偍傑偐偵偼師偺傛偆側僌儔僼偲側傞偲峫偊傜傟傑偡
(恾偺墶幉偼偐側傝偄偄壛尭偱偡)丅
偦偙偱D/A曄姺婍偺弌椡偱偁傞乽Aout乿傪僀儞僶乕僞偺IN偵丄
傑偨僀儞僶乕僞偺弌椡傪A/D曄姺婍偺擖椡偱偁傞乽Ain乿偵丄
働乕僽儖傪梡偄偰愙懕偟傑偡丅

拲堄偲僸儞僩丗